
Start now with offline programming for welding!
Automation with robots is the only chance to meet the constantly growing shortage of qualified welders, especially in small and medium-sized companies. The most important requirement to achieve great flexibility and high profitability is fast and easy programming of the robots even for the small lot sizes. MOSES ARC is able to autonomously program welding robots with a degree of automation of up to 100%. This includes automatic welding process planning, automatic motion planning with all external axes and simulation-based program generation.
Automatic offline programming with MOSES ARC - adapted to your needs
MOSES ARC offers different possibilities to import information about the position of the welds or to generate it yourself.
1. Import of the geometry and weld seam information via the WISCON interface. With this interface, the weld seam data is transferred via an XML file and the geometry of the component via 3D-Step files or DSTV/NC.

2. If no weld seam information is available in the form of a WISCON file, the MOSES interface SSI (Solid Seam Interface) can be used. Here, the seams are evaluated in the form of 3D solids or line elements, which symbolize the weld seam in the drawing at the corresponding position on the component, and suitable weld and measurement contours are created. With the help of MOSES LSI (Line Seam Interface), simple lines can be used instead of solids to describe the weld seams.
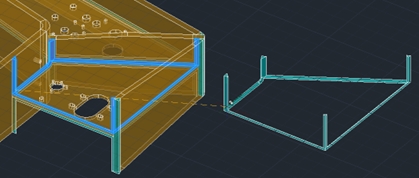
3. the geometry is imported as 3D stepfiles and the integrated tool "Seamdefiner" analyzes them and generated to a previously defined A dimension, which can also be taken from the modeled seam, all achievable weld paths and measurement contours.
4. Interactive programming is of course also available for the operator. Here, the workpiece is imported as a 3D solid and the programmer can click on body edges and define his weld paths with a few clicks.
How do I get a robot program from the weld seam information and the part geometry?
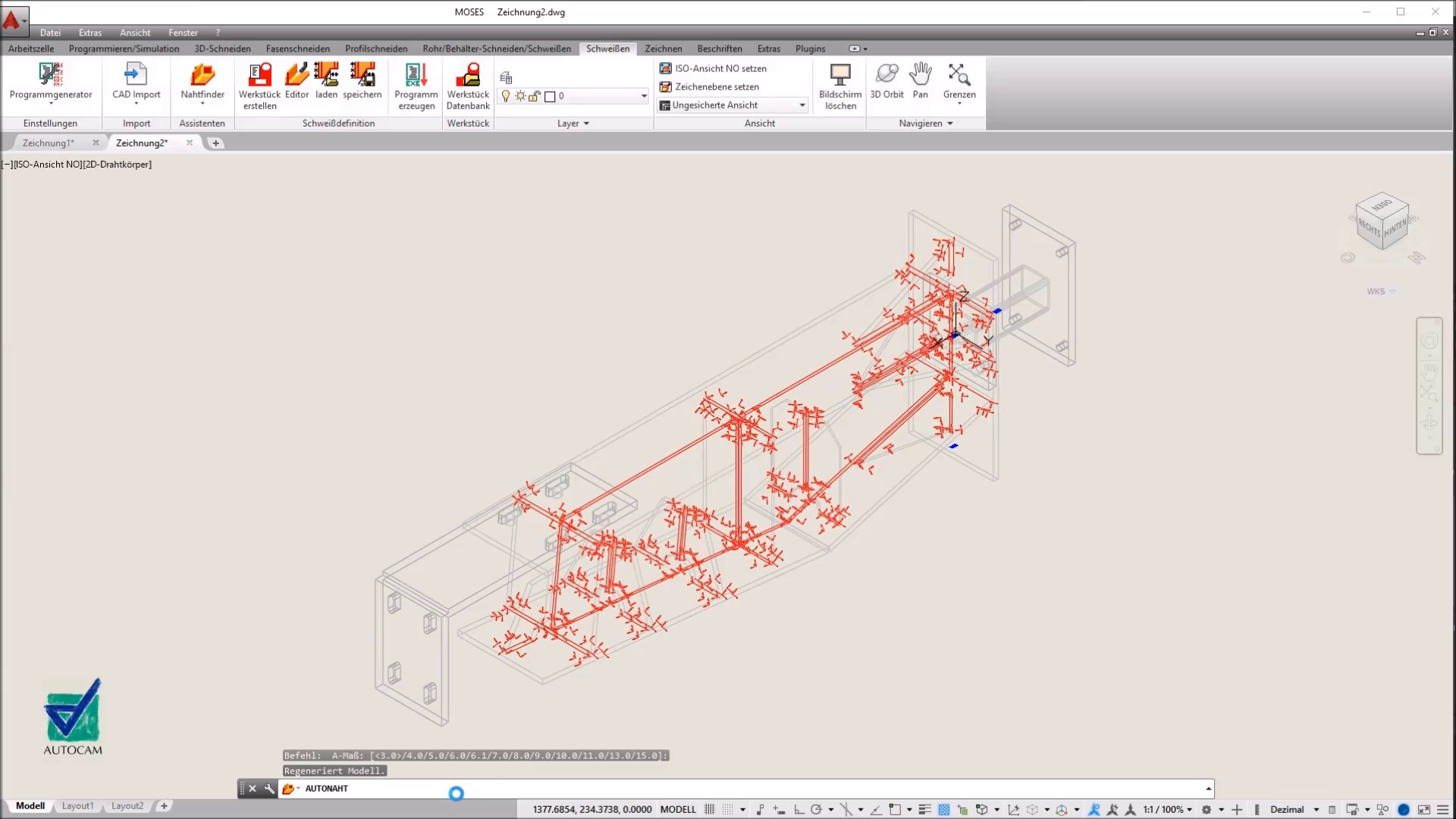
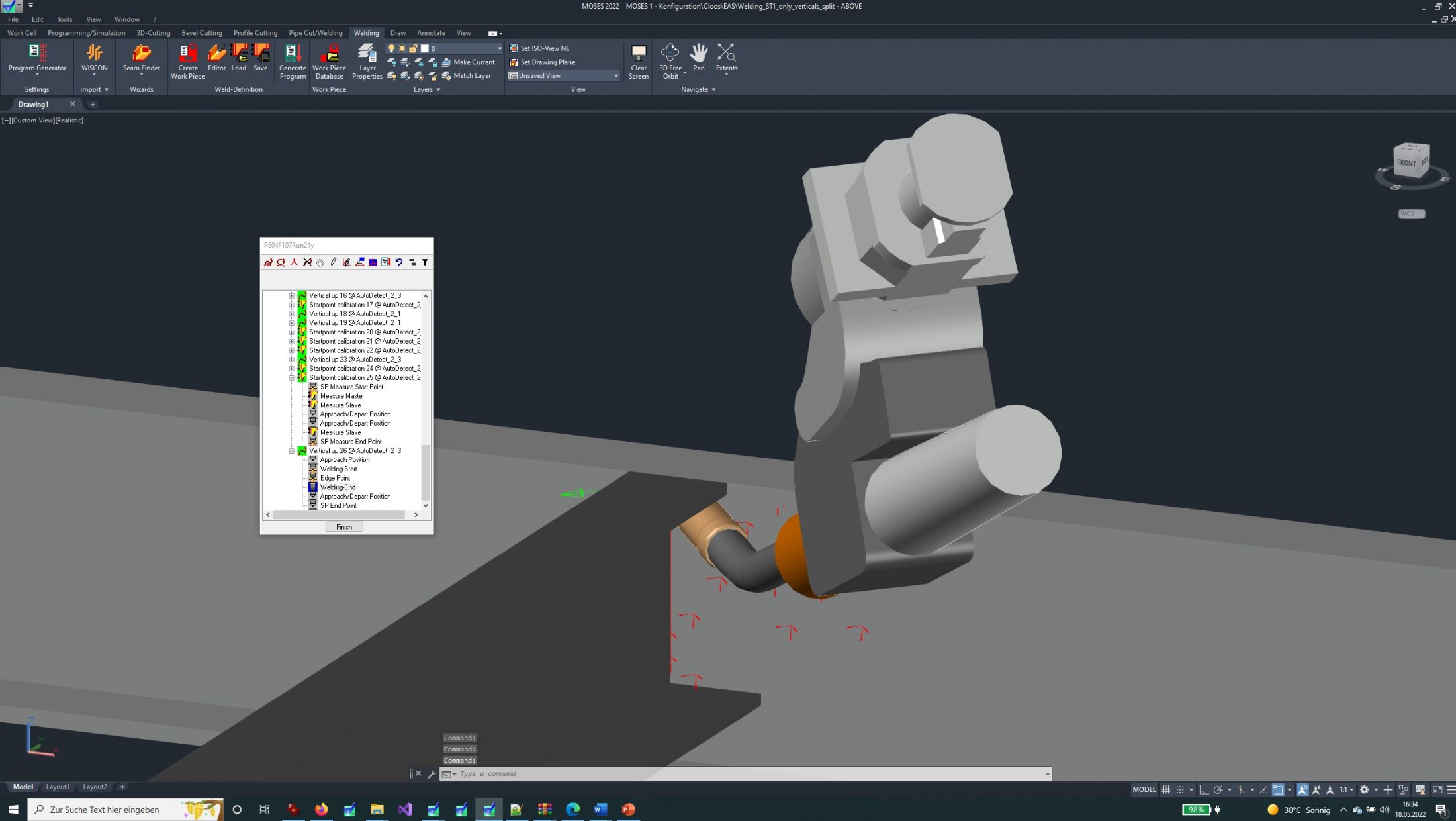
If MOSES has the information where to weld, how large the A dimension is and what the interference geometry around the weld seam looks like, collision-free positions for the corresponding welding torch on the weld track are generated fully automatically. Welding parameters and the Stacking of the welds are linked to the A dimension. In addition, measurement contours are generated to ensure that the beginning of the seam is in the joint in a process-safe manner. During welding, an arc sensor is usually used to compensate shape and position tolerances. The program code for your robot is generated fully automatically out of this information. In the subsequent simulation, the additional axes of the robot system are taken into account and integrated into the path planning.
MOSES Profile ARC
The welding of profiles in steel construction puts even higher demands on the programming system. MOSES ARC was therefore extended by functions for this special application. MOSES Profile ARC takes over the planning of the clamping of the workpiece fully automatically.
In addition, the rotational position of the profile is automatically determined for each weld seam on the external positioner. This ensures that no uphill or downhill seams have to be created and that the seams are easy to reach.

MOSES Ship ARC
Our welding application is also used in shipbuilding. In this area, for example, a 100% autonomous programming system for welding the wall elements of the cabins was implemented for a well-known manufacturer of cruise ships. The special feature here is that four robots are welding simultaneously on one component. Accordingly, MOSES Ship ARC takes over the entire welding planning. In addition, the customer had high requirements for the welding sequence. This planning is also handled by the software. In addition, MOSES Ship ARC creates the complete assignment plans for the welding tables fully automatically. The programs are created, simulated and exported to the machine without any operator interaction. The components are made available on a computer in STEP format.
